About Me
I am currently a Ph.D. candidate in the Department of Mechanical Engineering at Dongguk University, under the supervision of Professor Soo-chul Lim. I received my M.S. degree in Science from the same university.
My research interests include robotics, AI learning, and interaction forces between robots, objects, and humans. My ultimate goal is to develop robust robot behaviors and planning by integrating haptics, and to apply these advances to humanoid robotic systems that can interact in a human-like manner.
- History

Publications
Latency-free driving scene prediction for on-road teledriving with future-image-generation
IEEE Transactions on Intelligent Transportation SystemsLee, Kang-Won; Ko, Dae-Kwan; Kim, Yong-Jun; Ryu, Jee-Hwan; Lim, Soo-Chul; (2024)
“IEEE Transactions on Intelligent Transportation Systems, IEEE”
Vision-based interaction force estimation for robot grip motion without tactile/force sensor
Expert Systems with ApplicationsKo, Dae-Kwan; Lee, Kang-Won; Lee, Dong Han; Lim, Soo-Chul; (2023)
“Expert Systems with Applications, Vol. 211, pp. 118441, Pergamon”
Real-time video prediction using gans with guidance information for time-delayed robot teleoperation
International Journal of Control, Automation and SystemsYoon, Kang-Il; Ko, Dae-Kwan; Lim, Soo-Chul; (2023)
“International Journal of Control, Automation and Systems, Vol. 21(7), pp. 2387-2397, Institute of Control, Robotics and Systems and The Korean Institute of …”
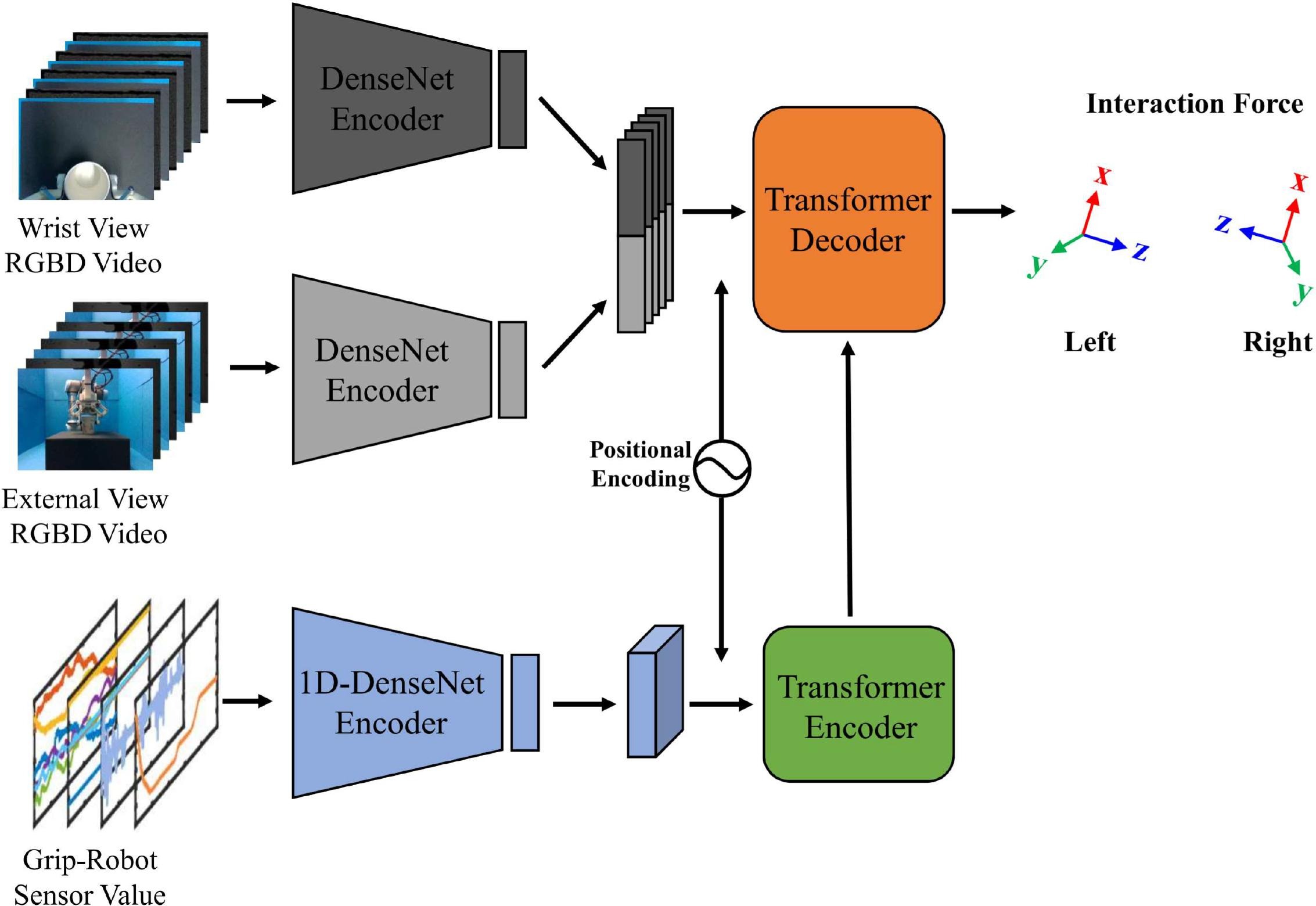
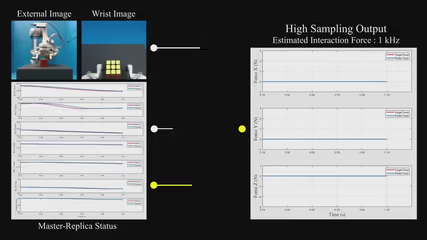
Toward vision-based high sampling interaction force estimation with master position and orientation for teleoperation
IEEE Robotics and Automation LettersLee, Kang-Won; Ko, Dae-Kwan; Lim, Soo-Chul; (2021)
“IEEE Robotics and Automation Letters, Vol. 6(4), pp. 6640-6646, IEEE”
Continuous image generation from low-update-rate images and physical sensors through a conditional GAN for robot teleoperation
IEEE Transactions on Industrial InformaticsKo, Dae-Kwan; Lee, Dong-Han; Lim, Soo-Chul; (2020)
“IEEE Transactions on Industrial Informatics, Vol. 17(3), pp. 1978-1986, IEEE”
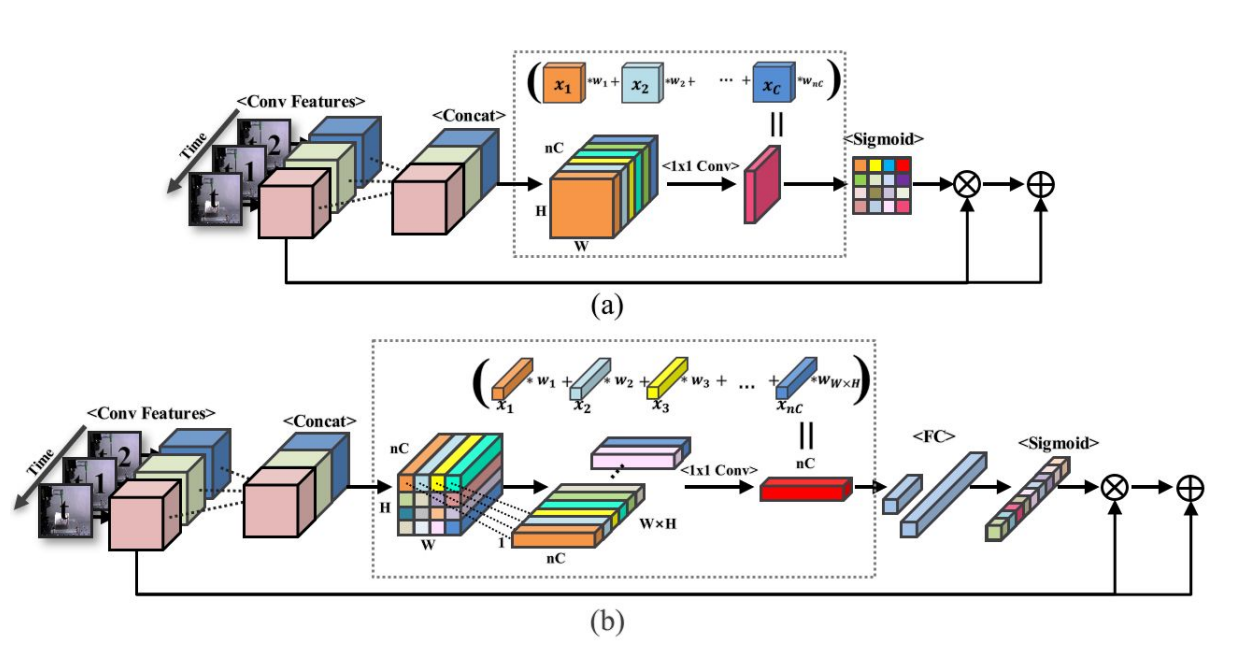
Sequential image-based attention network for inferring force estimation without haptic sensor
IEEE AccessShin, Hochul; Cho, Hyeon; Kim, Dongyi; Ko, Dae-Kwan; Lim, Soo-Chul; Hwang, Wonjun; (2019)
“IEEE Access, Vol. 7, pp. 150237-150246, IEEE”
Transparent and flexible mayan-pyramid-based pressure sensor using facile-transferred indium tin oxide for bimodal sensor applications
Scientific reportsJung, Minhyun; Vishwanath, Sujaya Kumar; Kim, Jihoon; Ko, Dae-Kwan; Park, Myung-Jin; Lim, Soo-Chul; Jeon, Sanghun; (2019)
“Scientific reports, Vol. 9(1), pp. 14040, Nature Publishing Group UK London”
Flexible Multi-Modal Sensor for Electronic Skin
2019 IEEE International Conference on Flexible and Printable Sensors and Systems (FLEPS)Jung, Minhyun; Vishwanath, Sujaya Kumar; Kim, Jihoon; Ko, Dae-Kwan; Park, Myung-Jin; Lim, Soo-Chul; Jeon, Sanghun; (2019)
“2019 IEEE International Conference on Flexible and Printable Sensors and Systems (FLEPS), pp. 1-3, IEEE”
Which LSTM type is better for interaction force estimation?
2019 7th International Conference on Robot Intelligence Technology and Applications (RiTA)Cho, Hyeon; Kim, Hyungho; Ko, Dae-Kwan; Lim, Soo-Chul; Hwang, Wonjun; (2019)
“2019 7th International Conference on Robot Intelligence Technology and Applications (RiTA), pp. 61-66, IEEE”
Structural vibration-based classification and prediction of delamination in smart composite laminates using deep learning neural network
Composites Part B: EngineeringKhan, Asif; Ko, Dae-Kwan; Lim, Soo Chul; Kim, Heung Soo; (2018)
“Composites Part B: Engineering, Elsevier”
Projects
A real-world demonstration of VLA robot control using PI-Zero and Kinova Gen3 Lite.
AI Info
• VLA Model: π0
• Prompt: “clean the table”
• Training Dataset: 12 episodes (each 50s)
• Training Time: 6 hours
System Info
• Robot: KINOVA Gen3 Lite
• Camera: Intel RealSense D435f & L515 (color only)
• CPU: AMD RYZEN 5900X
• GPU: NVIDIA RTX 4090 24GB
• Control Rate: 10 Hz
System Integration: DaeKwan-Ko (Ph.D. student)
Experience
SNUAILAB Co., Ltd.
Senior Researcher (Professional Research Personnel – Alternative Military Service)
December 2022 – February 2025 | Seoul, South Korea
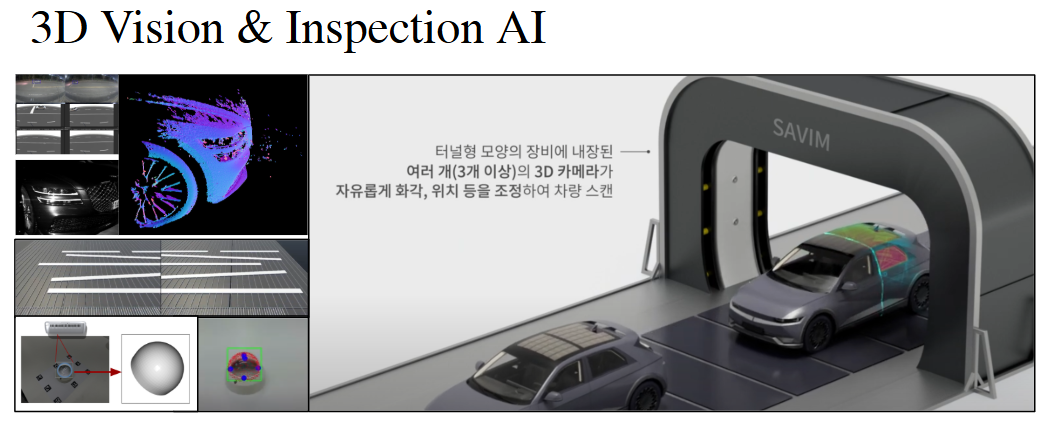
AI and 3D vision technology company specializing in advanced vision solutions for industrial and smart city applications.
- Led 3D vision and AI system core modules and coordinated with cross-functional teams.
- Owned and implemented industrial object detection and thermal video super-resolution solutions while collaborating with UI, QA, and backend engineers.
- Developed mobile vehicle license plate recognition and quality inspection systems.
- Managed PoC projects and secured contracts with major clients (e.g., Daifuku, HMC).
- Main technologies: PyTorch, Python, Open3D, OpenCV.
MEERECOMPANY Co., Ltd.
Senior Researcher (Professional Research Personnel – Alternative Military Service)
February 2021 – December 2022 | Songpa-gu, Seoul, South Korea
A leading Korean company specializing in surgical robotics and high-precision automation.
- Participated in the development of next-generation surgical robot systems with a focus on software reliability and safety.
- Contributed to real-time control architecture, motion planning, and dynamic model analysis for robot manipulators.
- Involved in RTOS-level implementation and hardware communication via EtherCAT.
- Conducted modeling and validation using MATLAB Simulink and Simscape frameworks.
- Worked under strict confidentiality as part of a nationally regulated core technology project.
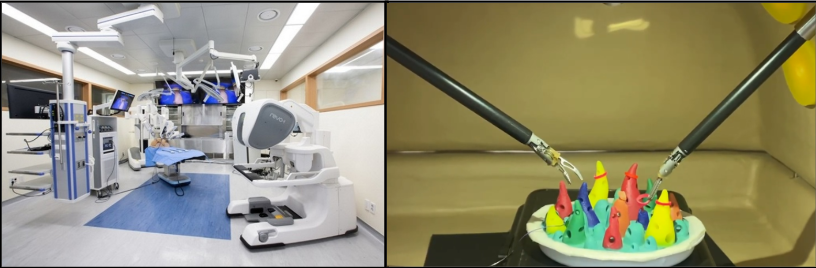
Publicly available image for illustrative purposes only. Actual system visuals are restricted due to confidentiality.
HEALINGSOCIETY Inc. (Brand: HEALSO)
CTO (Co-founder)
February 2013 – February 2016 | Seoul, South Korea
Healthcare startup developing ultrasonic body fat measurement devices and mobile-connected accessories.
- Co-founded HEALINGSOCIETY and led all technical initiatives as CTO.
- Developed ultrasonic-based body fat measurement devices.
- Designed and integrated smartphone accessories with mobile applications.
- Built a full-stack pipeline from product design to market launch as a startup CTO.
- Gained hands-on experience in hardware/software integration, user feedback loops, and commercial product iteration

Patents
KR-10-2648104-0000
Method, Device, and Computer Program for Measuring Vehicle Step Difference
Ko, Dae Kwan; Koo, Ja Chun; Yoon, Jin
Registered Korean Patent
KR-10-2260882-0000
Sequential Image-based Interaction Force Measurement Method and Device
Hwang, Won Joon; Shin, Ho Cheol; Kim, Dong Yi; Lim, Soo Chul; Ko, Dae Kwan
Registered Korean Patent
KR-10-2313160-0000
High-Resolution Video Generation Method and Device Using Motion Information
Lim, Soo Chul; Ko, Dae Kwan; Lee, Dong Han
Registered Korean Patent
KR-10-2094360-0000
Image-based Force Prediction System and Method
Lim, Soo Chul; Hwang, Won Joon; Shin, Ho Cheol; Lee, Dong Han; Ko, Dae Kwan
Registered Korean Patent
KR-10-2018-0138258 (Application)
Two-point Identification Inspection Device and Method
Lim, Soo Chul; Ko, Dae Kwan
Korean Patent Application
Education
Dongguk University
Ph.D. in Mechanical Engineering (on-going)
March 2025 – Present
Department of Mechanical Engineering, Dongguk University.
Ph.D. candidate under the supervision of Prof. SooChul Lim. Research focus: robotics, AI, and physical AI about human-robot/object interaction forces.
Dongguk University
M.S. in Mechanical Engineering (Vibration Control and Automation)
March 2019 – February 2021
Graduate School of Mechanical, Robotics, and Automation Engineering.
Focused on vibration control, automation, and advanced mechatronics. Completed research-based thesis under Prof. SooChul Lim.
Dongguk University
B.S. in Mechanical Engineering
March 2012 – February 2019
School of Mechanical Engineering, Dongguk University.
Completed undergraduate coursework and projects in mechanical engineering fundamentals, including robotics and automation.